首页 > 新闻中心 > 机器人 > 智能控制
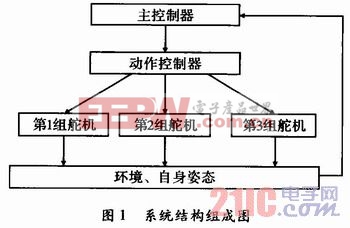
为了解决自平衡人形机器人多关节协调控制问题,提高系统控制品质,借鉴计算机系统结构中的分层结构体系思想,提出了一种新的自平衡人形机器人动作控制器的实现方法,并根据该动作控制器设计出了一种相应的控制方法,可帮助机器人系统较好......
43.2%在阅读
23.2%在互动