爆炸驱动的昆虫机器人可携带自重22倍负荷

CAMERON AUBIN
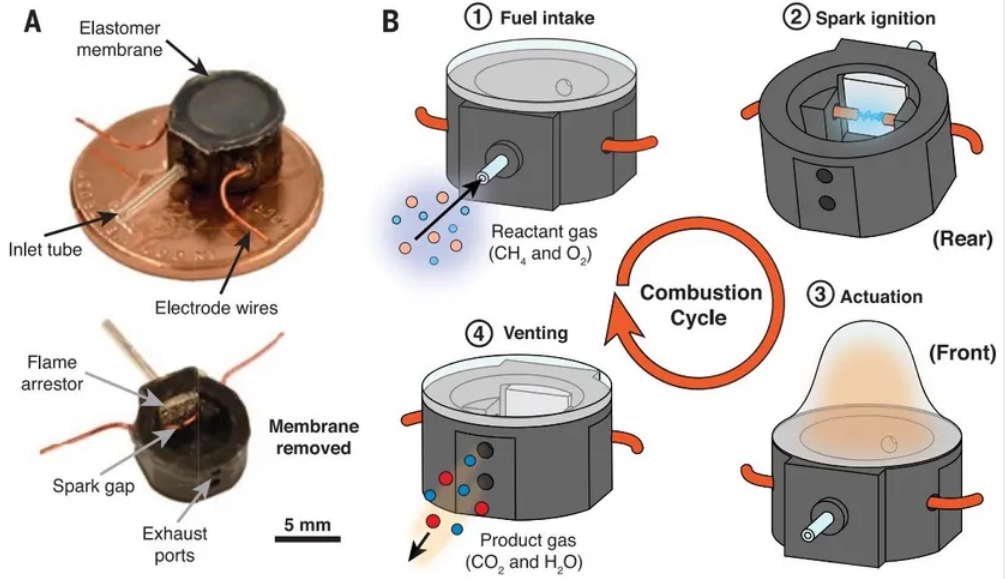
在9月14日发表在《科学》杂志上的一篇名为Powerful, soft combustion actuators for insect-scale robots的论文(https://www.science.org/doi/10.1126/science.adg5067)中,康奈尔大学的研究人员用一台非常微小、非常柔软的内燃机解决了小规模驱动问题。甲烷蒸汽和氧气被注入一个软燃烧室,在那里一个小小的火花点燃了混合物。在半毫秒内,腔室的顶部像活塞一样向上膨胀,在每秒可以重复100次的循环中产生9.5牛顿的力。把其中两个致动器放在一起(一块驱动两条腿),你就得到了一个非常强大的软四足机器人。
为该机器人每条腿提供动力的是两个执行器,重量仅为 325 毫克,大约是一美分硬币大小的四分之一。它们之所以如此小型,部分原因是大多数相关部件都在机外,包括燃料本身、混合和输送燃料的系统以及火花发生器的电源。但是,即使没有所有这些东西,致动器也有一个束,使其能够在高循环频率下连续运行而不会熔化。
SCIENCE ROBOTICS
这些工程成果中的第一个是一个小型昆虫规模的四足机器人,它利用其中两个软燃烧致动器为每条腿提供动力。这个机器人长29毫米,重1.6克,但它可以直立跳跃59厘米,行走时的重量是它自身重量的22倍。Shepherd说,对于昆虫规模的机器人来说,这是“接近昆虫水平的表现,跳得非常高,速度非常快,负载很大。”
康奈尔大学有机机器人实验室的负责人Robert F.Shepherd说:“有趣的是,这展示了小规模燃烧的威力能有多大。”近十年前,我们(作者,以下简称我)在2014年的IROS(https://spectrum.ieee.org/squishy-pink-robot-makes-explosive-jumps)上报道了Shepherd在燃烧动力机器人方面的一些工作。但Shepherd告诉我们,小型化既有挑战,也有好处。“我们在可燃气体体积的下限下运行。这对科学来说是一个有趣的地方,工程成果也很有用。”
这些工程成果中的第一个是一个小型昆虫规模的四足机器人,它利用其中两个软燃烧致动器为每条腿提供动力。这个机器人长29毫米,重1.6克,但它可以直立跳跃59厘米,行走时的重量是它自身重量的22倍。Shepherd说,对于昆虫规模的机器人来说,这是“接近昆虫水平的表现,跳得非常高,速度非常快,负载很大。”
由于致动器移动得太快,所以很难看到四足动物实际上是如何行走的。每个致动器控制机器人的一侧,一个燃烧室用弹性体膜连接到每个脚部的燃烧室。这种驱动系统的一个优点是,由于动力源是气体压力,你可以在燃烧室本身之外的某个地方实现这种压力。同时启动两个致动器会使机器人向前移动,而启动一侧或另一侧可以旋转机器人,从而提供一些方向控制。
Shepherd告诉我们:“研制出这种可操纵的昆虫级机器人需要大量的精力、迭代和智慧。它必须有腿吗?不,它可能是一只快速的蛞蝓,也可能是一个扑翼的蜜蜂。这个系统可能的振幅和频率允许所有这些可能性。”
让这些致动器稍微减速是研究人员下一步要研究的事情之一。通过用速度换取力量,我们的想法是制造出既能行走又能奔跑和跳跃的机器人。当然,找到一种方法来解开这些系统是自然的下一步。Shepherd告诉我们,他们正在考虑的其他一些事情非常疯狂:“我们未来想探索的一个想法是,在大型机器人中使用这些小型而强大的致动器作为大型、可变的补充肌肉组织。将数千个致动器捆绑在刚性内骨骼上,可以实现灵巧、快速的陆基混合机器人。就我个人而言,我甚至很难想象这样的机器人,但这就是它令人兴奋的地方,对吧?—— 想象一下,一个肌肉发达的大型机器人,由成千上万的微小爆炸提供动力。”
来自康奈尔大学的Cameron A.Aubin、Ronald H.Heisser、Ofek Peretz、Julia Timko、Jacqueline Lo、E.Farrell Helbling、Sadaf Sobhani、Amir D.Gat和Robert F.Shepherd所著的Powerful, soft combustion actuators for insect-scale robots(https://www.science.org/doi/10.1126/science.adg5067)发表在《科学》杂志上。
*博客内容为网友个人发布,仅代表博主个人观点,如有侵权请联系工作人员删除。


