车载姿态测量系统的开发

3 实车试验
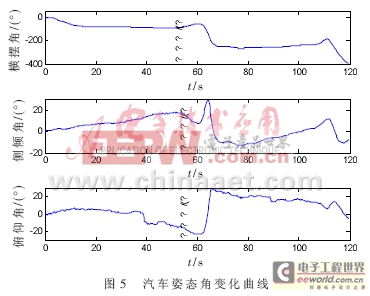
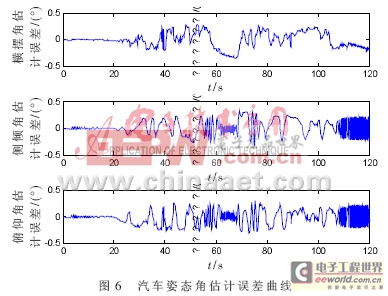
为了检验该汽车运动姿态测量系统的效果,进行了实车试验。试验时将MIMU固定于汽车质心位置处,并且保证传感器所组成的测量坐标系平行于车体坐标系,加速度计正向指向相应的坐标轴的正向,陀螺仪的分布和坐标轴一致,测量给定轴的旋转角速度,旋转的正方向由右手定则确定[3]。在完成MIMU的安装、系统接线、传感器的标定和软件的初始化设置等工作后即可开展实车道路试验。图4是试验采集得到并经初始滤波后的汽车6自由度运动信号。图5是试验得到的汽车姿态角变化曲线。图6为进一步试验得到的汽车姿态角估计误差曲线,从图中可以看出,由于引入Kalman滤波融合算法[4],使得姿态角估计误差小于0.5°,满足了汽车运动姿态测量的精度要求,说明本测量系统的可行性。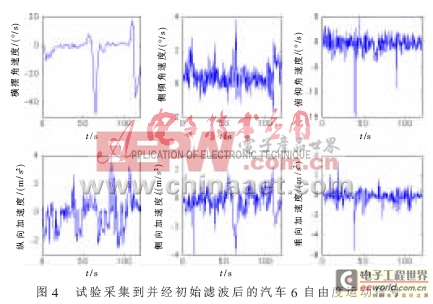
本文研究了捷联式车载姿态测量系统。自主设计了微惯性测量单元(MIMU)和基于USB2.0接口的数据采集卡,并应用Visual Basic 2005开发了数据采集软件和数据处理软件,最后通过实车道路试验验证了本实时测量系统的可行性。另外,此系统具有体积小、使用方便、成本低廉等优点。如果通过选取精度更高的MEMS传感器和采用更为高效的实时预测方法,可以进一步地提高系统的预测精度。
加速度计相关文章:加速度计原理






评论