无线传感器网络中的DV—HOP定位改进算法


用未知节点之间连通度差的绝对值的和来定义连通度的不同,比如N1与N2之间连通度的不同为|1—2|+|1—1|+|2—1|+|5—4|=3。这样可以计算N1到其他所有未知节点的连通度的不同,如表2所列。

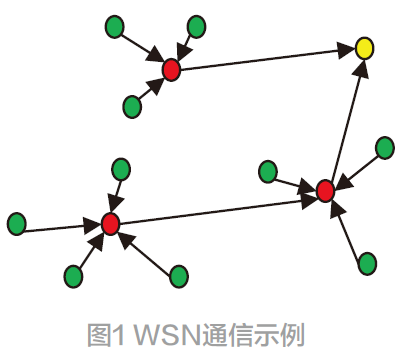
由表2可以得出,N2、N3到N1连通度不同为3、4,而N4、N5到N1连通度不同为9、11。说明N1离N2、N3更近。这一点也可以从图1中看出。
2.2.2 确定最优的3个锚节点
选择性锚节点的节点分布图如图2所示。未知节点Nx代表未知节点的实际位置,N(i,j,k)为根据3个锚节点组合所估算的位置,R为节点的通信半径,An是离N(i,j,k)最近的锚节点,Am为通信范围R之外的任意锚节点。

An的位置情况有3种:在0.5R的通信范围内;在0.5R~R的通信范围内;在R通信范围之外。这样计算AHD(i,j,k),m就有3种可能:

其中,AHD(i,j,k),m为根据3个锚节点组合所估算的位置节点与锚节点Am之间的平均跳距,AHDn,m为锚节点An与锚节点Am之间的平均跳距,AHDm为锚节点Am的平均跳距。
N(i,j,k)与锚节点Am之间的距离P(i,j,k),m可以计算出来,那么就可以算出N(i,j,k)与锚节点Am之间的跳数hop(i,j,k),m,公式为:
![]()
假设一共有n个锚节点,这样N(i,j,k)与Nx计算出来的连通度的不同可以表示为
![]()
Nx选出最小的连通度不同的节点是最为靠近Nx的节点(即定位的误差最小)。
3 算法仿真实验
为了验证算法理论的可行性,在100 m×100 m的区域中,对提出的改进的DV—Hop算法用Matlab7.0进行实验仿真,将实验结果与原DV—Hop算法和参考文献的算法进行对比分析。仿真数据随机运行50次,最后取平均值。
3.1 测距误差
测距误差是指节点间的估算距离与实际距离的差值。在100 m×100 m的区域中,随机分布100个节点进行仿真实验,其中有一部分部署的是锚节点,是能够获知自身位置信息的节点,且锚节点和未知节点具有相同的通信半径。通过设置不同的锚节点比例和节点通信半径,比较改进的算法与原DV—Hop算法对测距误差的影响。图3为通信半径为10 m时的测距误差,图4为通信半径为20 m时的测距误差。







评论